15. 3D SLAM With RTAB-Map
3D SLAM With RTAB-Map
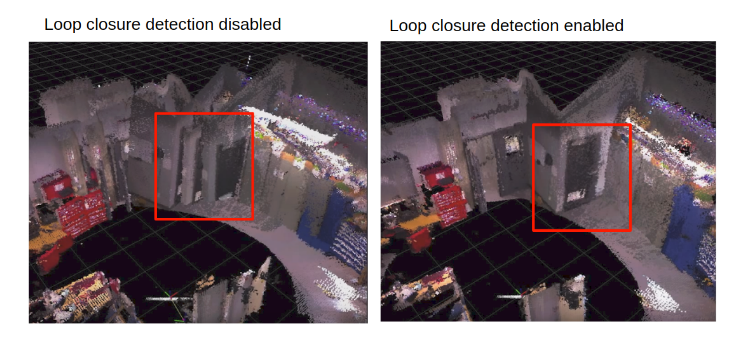
The importance of loop closure is best understood by seeing a map result without it!
When loop closure is disabled, you can see parts of the map output that are repeated, and the resulting map looks a lot more choppy. It is not an accurate representation of the environment. This is caused by the robot not using loop closure to compare new images and locations to ones that are previously viewed, and instead it registers them as new locations. When loop closure is enabled, the map is significantly smoother and is an accurate representation of the room.
For example, on the left, where loop closure is disabled, you'll see highlighted where the door is represented as multiple corners and parts of a door, where on the right, you see a single clearly defined door.